Ứng dụng bộ điều khiển thụ động kết hợp quan sát cho hệ thống cầu trục mô hình con lắc đôi
Thứ hai, 13/05/2024 - 13:02
Nghiên cứu đề xuất một bộ điều khiển thụ động kết hợp bộ quan sát trạng thái cho hệ thống cầu trục con lắc đôi. Động lực học của hệ thống được xây dựng bằng cách áp dụng phương trình Euler - Lagrange.
TÓM TẮT:
Nghiên cứu đề xuất một bộ điều khiển thụ động kết hợp bộ quan sát trạng thái cho hệ thống cầu trục con lắc đôi. Động lực học của hệ thống được xây dựng bằng cách áp dụng phương trình Euler - Lagrange. Dựa trên phương trình động lực học, bộ điều khiển được xây dựng cho phép hệ thống di chuyển tải trọng tới vị trí mong muốn đồng thời giảm rung lắc. Bộ điều khiển đảm bảo tính ổn định theo tiêu chuẩn Lyapunov. Mô phỏng được thực hiện để xác thực tính chính xác và hiệu quả của bộ điều khiển. Do yêu cầu về độ chính xác về vị trí, góc dao động nhỏ, thời gian đáp ứng không quá lớn nên bộ điều khiển phải có chất lượng cao và phù hợp với từng hệ thống.
Từ khóa: Cầu trục, điều khiển thụ động, bộ quan sát trạng thái.
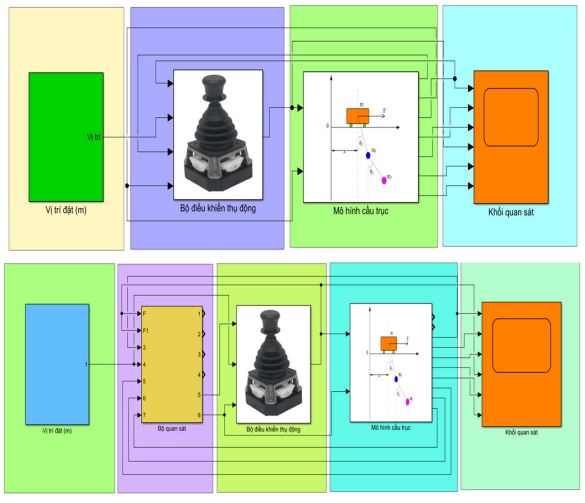
Sơ đồ khối hệ thống điều khiển cầu trục kiểu con lắc kép
Xem chi tiết: tại đây
Bùi Thị Khánh Hòa, Hà Văn Phương, Phạm Văn Huy (Khoa Điện, Trường Đại học Công nghiệp Hà Nội)
Nguồn: Tạp chí Khoa học và Công nghệ Đại học Công nghiệp Hà Nội (Tập 59 - Số 5)