Thứ hai, 09/06/2025 | 20:55 GMT+7
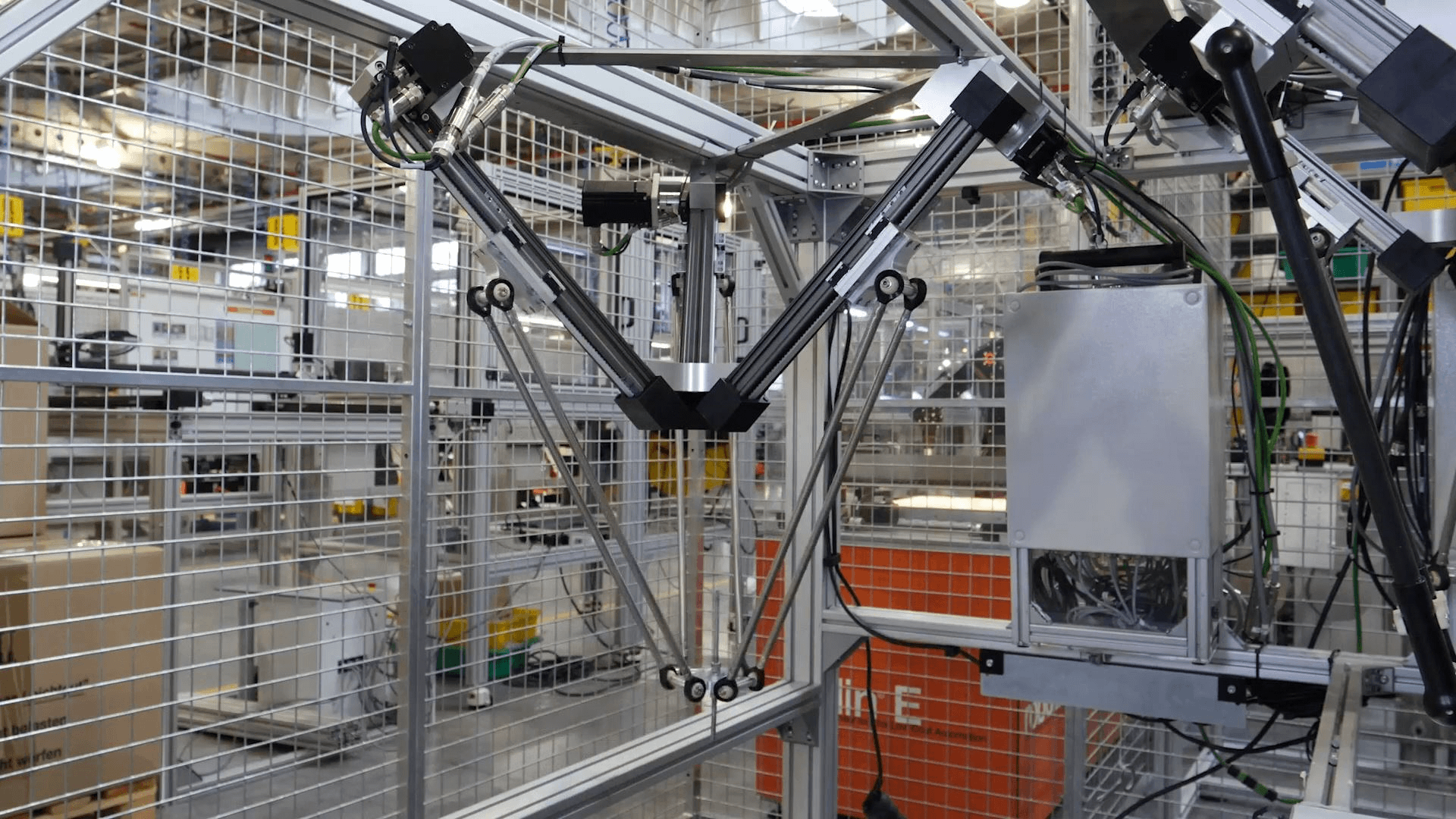
DESIGN OF THE ROBOT DELTA PARAMETER BASED ON THE ROBOT WORKSPACE Abstract: Delta robot is a parallel robot which can provide precise positions of the working head so it is widely used in industrial applications to pick-and-drop products in the production lines. The optimization of parameters of the robot to obtain the desired workspace is an important task. This paper provides a method to determine the robot parameters based on a given robot workspace. The algorithm used to calculate the forward kinematics and the constraints between the basic dimensions of the robot arms are proposed. The optimal algorithm used to limit the parameter domain to the dimensions of the arms of the robot is also proposed in the paper. Keywords: Robot kinematics, Delta robots, robot workspace, simulation |

Các hoạt động khuyến công được các đơn vị tại Bắc Ninh tổ chức nhiều năm qua, thông qua việc bình chọn sản phẩm công nghiệp nông thôn tiêu biểu, nhằm tôn vinh các sản phẩm chất lượng, giá trị sử dụng cao, có tiềm năng phát triển.
06/06/2025


Đối với ngành da giày, các hiệp định thương mại tự do không chỉ mang lại cơ hội gia tăng xuất khẩu mà còn thúc đẩy sự đổi mới, chuyển đổi chuỗi cung ứng và cải thiện chất lượng sản phẩm để đáp ứng các tiêu chuẩn quốc tế.
04/06/2025